小柳 健一

ロボットアニメが研究者に与えた影響。
中学生の頃に読んだ『ZZガンダム』の中に、汎用的な土木建築作業を行うミドルスーツというものが出てきました。そこで人間の実作業を手助けする人型ロボットが存在しうることに気付き、大きな感銘を受けました。 ロボットの、特に人間型のヒューマノイドの研究をしている方はアニメーションの影響を受けた方が多いと思います。私も中学2年生の頃には現実的にロボット研究者になることを決めていました。 大学の卒業論文と修士論文では、ER流体を応用した粘性を制御可能なダンパー(振動をなくす為の装置)を、モーターに取り付けた高速高精度な位置制御の研究をテーマにしました。また、ER流体クラッチ(動力を他の所に伝達する為の装置)を内蔵した3次元上肢リハビリテーションロボットの開発やERブレーキを冗長個数用いたパッシブ型力学提示デバイスの開発を行ないました。
人間が操作する、安全で使いやすいロボットシステムを。
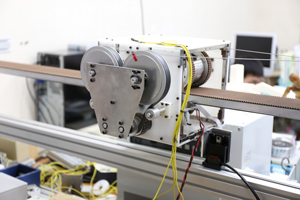 先に出したER流体等の機能性材料のメカトロニクス応用や、リハビリ・福祉支援ロボットの開発など、現在の研究テーマは多岐に渡ります。デバイスとして仕立て、いいものになったらそれをロボットの形にします。 ~ERゲルリニアアクチュエータ~ 例えば「ERゲルリニアアクチュエータ」という装置はERゲルがクラッチの役割をし、電圧をかけることで物を持ち上げる仕事に変換されます。これは後々パワーアシストロボットとして介護現場等で利用できるようにしたいと思っています。 ~上肢リハビリ支援システム~ 「上肢リハビリ支援システム」でも、ER流体ブレーキやクラッチが使われていて、ハンドルからぶつかった感覚が伝わります。力覚ですね。これはゲーム型になっていて、1ゲームクリアするごとに所要時間や壁にぶつかった回数が記録され、使う方の達成度に合わせてゲームの難易度もあがっていきます。
先に出したER流体等の機能性材料のメカトロニクス応用や、リハビリ・福祉支援ロボットの開発など、現在の研究テーマは多岐に渡ります。デバイスとして仕立て、いいものになったらそれをロボットの形にします。 ~ERゲルリニアアクチュエータ~ 例えば「ERゲルリニアアクチュエータ」という装置はERゲルがクラッチの役割をし、電圧をかけることで物を持ち上げる仕事に変換されます。これは後々パワーアシストロボットとして介護現場等で利用できるようにしたいと思っています。 ~上肢リハビリ支援システム~ 「上肢リハビリ支援システム」でも、ER流体ブレーキやクラッチが使われていて、ハンドルからぶつかった感覚が伝わります。力覚ですね。これはゲーム型になっていて、1ゲームクリアするごとに所要時間や壁にぶつかった回数が記録され、使う方の達成度に合わせてゲームの難易度もあがっていきます。 ERゲルはER流体をシート状に固めたもので、研究室ではこれを用いたデバイスの開発をしています。機構の設計からデバイスの制御、評価まで行ないます。ハードウェアからソフトウェアまで広い範囲が研究対象です。今後は上記のような力覚提示デバイスやリハビリロボットに応用している研究を実用化させたい。臨床試験も行なわれており、もう一歩です。
ERゲルはER流体をシート状に固めたもので、研究室ではこれを用いたデバイスの開発をしています。機構の設計からデバイスの制御、評価まで行ないます。ハードウェアからソフトウェアまで広い範囲が研究対象です。今後は上記のような力覚提示デバイスやリハビリロボットに応用している研究を実用化させたい。臨床試験も行なわれており、もう一歩です。
使う<誰か>を想いながらつくる。
 基盤的な研究から応用研究、ハードウェアからソフトウェア、制御からインタフェースとしての見た目のデザインまで何もかもを学生達はしています。作業量は凄まじく多い。けれども、妥協せずにやりきらないといけないという姿勢だけは持ち続けてほしい。学術的に本当に大切な所をおろそかにしない。その上で「自分が作ったものが動く」といった感動や、実際に社会で使われる喜びを実感してもらいたいと思います。うまくいかなかったり、やり方が分からないことも多くあるでしょうが、それを一緒に考えていくことが、私たちの仕事なのです。
基盤的な研究から応用研究、ハードウェアからソフトウェア、制御からインタフェースとしての見た目のデザインまで何もかもを学生達はしています。作業量は凄まじく多い。けれども、妥協せずにやりきらないといけないという姿勢だけは持ち続けてほしい。学術的に本当に大切な所をおろそかにしない。その上で「自分が作ったものが動く」といった感動や、実際に社会で使われる喜びを実感してもらいたいと思います。うまくいかなかったり、やり方が分からないことも多くあるでしょうが、それを一緒に考えていくことが、私たちの仕事なのです。
【プロフィール】
2001.5大阪大学大学院工学研究科助手、2006.4富山県立大学工学部知能ロボット工学科講師、2010.4同大学准教授、2018.4同大学教授
