カリキュラム
カリキュラム(学部)
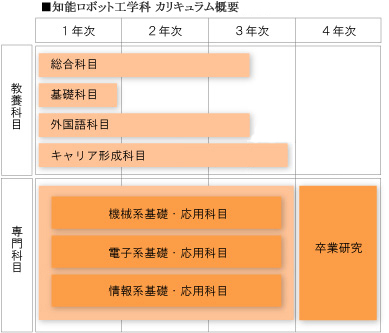 知能ロボット工学科では、工学の三大分野である機械・電子・情報工学の各分野と、それら三分野にまたがる広い工学分野の基礎と応用を学ぶことができます。このため本学科では、1~2年次には工学を学ぶために不可欠な数学や物理学などの基礎科目および総合科目・外国語などの教養科目を学び、2~3年次には専門科目である機械工学、電子工学、情報工学の基礎と応用を学びます。そして、4年次には自分の専門を選択し、卒業研究に取り組みます。 これによって、21世紀の産業界が求めている、マクロからミクロまで幅広い視野で先端的な技術開発にチャレンジできる技術者・研究者となる礎を身につけることができます。また、いずれは社会人として仕事をするという意識とそれに必要なコミュニケーション能力を育むためのキャリア形成科目の一部も、本学科の教員が講義を担当しています。 < カリキュラム詳細 >
知能ロボット工学科では、工学の三大分野である機械・電子・情報工学の各分野と、それら三分野にまたがる広い工学分野の基礎と応用を学ぶことができます。このため本学科では、1~2年次には工学を学ぶために不可欠な数学や物理学などの基礎科目および総合科目・外国語などの教養科目を学び、2~3年次には専門科目である機械工学、電子工学、情報工学の基礎と応用を学びます。そして、4年次には自分の専門を選択し、卒業研究に取り組みます。 これによって、21世紀の産業界が求めている、マクロからミクロまで幅広い視野で先端的な技術開発にチャレンジできる技術者・研究者となる礎を身につけることができます。また、いずれは社会人として仕事をするという意識とそれに必要なコミュニケーション能力を育むためのキャリア形成科目の一部も、本学科の教員が講義を担当しています。 < カリキュラム詳細 >
■主な講義科目
知能ロボット工学科の専門科目は、専門共通科目、専門基礎科目、専門科目の3群に分類されています。 専門共通科目は、分野全体を把握するための知能ロボット工学概論、3つの実習と演習、2つの実験、外部講師による特別講義、そして各教員による少人数の専門ゼミから構成されています。これらを受講することにより、知能ロボット工学という幅広い分野の全体像を学ぶとともに、その一端を体験することができます。 専門基礎科目は、6つの数学系の基礎科目と、工業力学という機械系の基礎科目、電気回路という電子系の基礎科目、2つのコンピュータに関する基礎科目から構成されています。これらを受講することにより、機械・電子・情報にまたがる知能ロボット工学を深く学ぶための土台を固めます。 専門科目は、31の機械・電子・情報系の応用科目から構成されています。このうちの約半数は必修科目ですが、残りは選択科目です。4年生の卒業研究を行うときには、自分の「専門」を決める必要があります。学生諸君は、それまでに、興味を持った専門科目を自分で選んで、知能ロボット工学のより専門的な内容を学んでいきます。 卒業研究は、4年間の集大成です。各教員のきめ細かな指導を受けながら、自分の研究テーマについての論文をまとめあげます。一年かけてシステム造りや材料造り、実験や計算などを行うので、学生諸君は自分でも驚くほど成長します。
■よろずレポート相談所
学生のみなさんは、実験、演習、講義などで多くのレポートを作成することを通じ、専門科目の理解を深めていきます。しかし、それらの作成に慣れるまでは、多くの時間を費やしてしまいますし、作成に手間取り悪戦苦闘することもしばしばです。そこで、知能ロボット工学科では、大学院生または学部4年生が相談員となって、下級生に助言を与える場を組織的に提供しています。学生同士が教えあうことを通じて、レポートの完成度を高めるとともに、上級生と下級生の結びつきを深めることを目指しています。さらに、相談員にとっては、下級生からの相談に応じることで学力向上が期待されます。
カリキュラム(大学院)
知能デザイン工学専攻は、機械工学・電子工学・情報工学のいずれかの学問領域に軸足を置きつつ、三領域にまたがる広範囲な知識と幅広い視野をもって賢いシステムを設計できる、多才な人材を育成することを目標としています。そのために、本専攻では軸足を置く領域の高度な専門知識を身につけるとともに周辺領域の関連知識を学び、マクロからミクロレベルまで幅広い視野で次世代のさまざまな技術を開発する能力を育む教育と研究を行っています。 具体的には、賢いロボットについて考究する知能システム工学部門、賢いヒューマン・インタフェースについて考究する知的インタフェース工学部門、マイクロ・ナノ領域の賢い計測・加工法を考究するマイクロ・ナノシステム工学部門、賢い機能デバイスについて考究する電子ナノデバイス工学部門の4部門を柱として、機械工学・電子工学・情報工学にまたがり高度な教育・研究カリキュラムを定め、大学院教育を行っています。
■主な講義科目
知能システム工学部門
| ロボットデジタル制御 | 伝達関数による古典制御理論、状態方程式による現代制御理論、最適制御と状態方程式、離散時間系について学びます。 |
|---|---|
| ロボット運動制御 | ロボットの運動制御に関する解析的手法や制御手法について学びます。 |
| 知的学習システム | ロボットの学習を通した知的な制御を実現するために、ソフトコンピューティングを用いた学習手法及び学習に基づく制御手法を学びます。 |
| センサロボット工学 | 社会実装が進んでいるセンサロボット技術を題材とし,ロボットの環境認識,自己位置推定,そしてマルチロボット間通信について学びます。 |
| ヒューマンロボットシステム | 「人の発話を解析し回答できるロボットをつくる」という観点から,探索,位置推定,学習と認識,言語と論理などの知識を学びます。 |
| マイクロロボティクス | ミクロな世界での運動学や流体の性質について解説した上で、マイクロロボットの実現に必要な、微細加工技術、顕微鏡技術、流体制御などを学びます。 |
| マイクロセンサ工学 | ロボットの動作を制御する上で注目されているマイクロセンサについて原理・特性から実用例・製造方法などを、人が五感を検知する原理と紐づけながら学びます。 |
知的インタフェース工学部門
| 知能情報工学 | 知能情報処理に必要なプログラミング技術の一つとして、アルゴリズムとデータ構造を学びます。 |
|---|---|
| 認知情報科学 | 人間の感覚・認知情報処理の研究方法を学び、その主要な知見について理解を深めます。 |
| 聴覚情報処理 | 音の物理と聴覚情報処理の基本を理解するとともに、人間の聴覚情報処理特性が現在の音響・通信システムにどのように関係しているのかを理解します。 |
| パターン認識システム | 文字・音声等のパターンを計算機で処理し認識するための基本的手法を修得するとともに、パターン認識が社会においてどのように応用されているかを学びます。 |
| VLSI設計 | CMOS技術の基礎を理解するとともに、VLSI設計のためのシステム設計手法や応用について学びます。 |
| 生体電磁環境工学 | 電磁界の生体への効果や影響について学とともに、それらの解析方法や応用技術について理解を深めます。 |
| 計算論的神経科学 | 脳の情報処理メカニズムを解き明かす主な手法を理解するとともに、脳の基本的な仕組み及びそれらを工学的に応用する方法について学びます。 |
| 応用統計学 | 確率・統計・検定について学ぶとともに、各種の実験結果に対する統計的仮説検定の基本的手法を習得します。 |
マイクロ・ナノシステム工学部門
| データ解析論 | 時系列信号、および画像データなどに含まれる情報を正しく解釈するために必要な基礎技術について学びます。 |
|---|---|
| 先端バイオ計測法 | 生命科学分野、先端医療分野で用いられている、ナノバイオ計測技術、先端医療工学機器の原理について理解を深めます。 |
| 先端材料加工学 | 超精密加工の実現に必要な各種加工技術を学ぶとともに、システム化に関する知識を深めます。 |
| 工業計量学 | 測定標準、トレーサビリティ、校正、不確かさなどについて理論的および実践的観点から学びます。 |
| 波動情報処理 | 通信及びレーダー・ソナー技術の基礎である、電磁波や音波の計測・信号処理について学びます。 |
電子ナノデバイス工学部門
| 強誘電体工学 | 強誘電体に関する基礎物性を理解した後、圧電材料としての基礎物性、圧電方程式、圧電材料の音響関連物理定数の求め方、及び圧電応用について学びます。 |
|---|---|
| ナノ物質物性論 | 量子論における摂動論、化学結合論の基礎を理解し、計算機を用いた種々の計算方法について理解を深めます。また量子コンピュータの基礎についても学びます。 |
| ナノ物性評価法 | 材料評価によく用いられるナノ物性現象であるX線回折と電気伝導の概略について学びます。 |
| ナノ構造制御デバイス | 電子デバイスに使用される半導体薄膜、誘電体薄膜の作製方法、評価方法、加工方法について学びます。 |