力センサ:触覚・聴覚

金属ひずみゲージの数十倍の感度を有するシリコンピエゾ抵抗素子を薄膜形状に加工し、弾性体中に埋め込むことで接触力・すべりを計測することが可能な超高感度・超小型触覚センサに関する研究を進めています。このセンサを用いることで、ロボットの動作制御や人の運動にかかわる力の解析など様々な応用方法に関して研究を進めています。
現在の研究テーマ:多軸フォースプレートを用いたロボットの動作制御

剛体版にシリコンピエゾ抵抗素子を用いた多軸力センサを複数配置し、剛体版にかかる力の分布を計測することで多軸合力・位置を計測可能なフォースプレート状センサを試作し、ロボットハンドの力・動作を制御する研究を進めています。このセンサを用いることで本学マスコットロボットであるドンマス教授ロボによるコミュニケーション動作の実現を目指します。
現在の研究テーマ:筋音情報を用いたスクワット動作の計測システム

筋肉は伸縮する際に音を発生します。この音を筋音と呼び、筋肉の活動を計測するための指針の一つとされています。この筋音と身体の動きとの関係を調べるため、高周波振動センサを用いた筋音計測システムを試作し、やはり試作した足裏設置力の分布を計測することが可能な靴型多軸力センサシステムの出力とを比較することで筋肉の動きと足が発生する力の関係を調べることが可能なシステムを実現しています。
現在の研究テーマ:加工装置の振動特性を計測するための ER 流体を利用した振動センサ
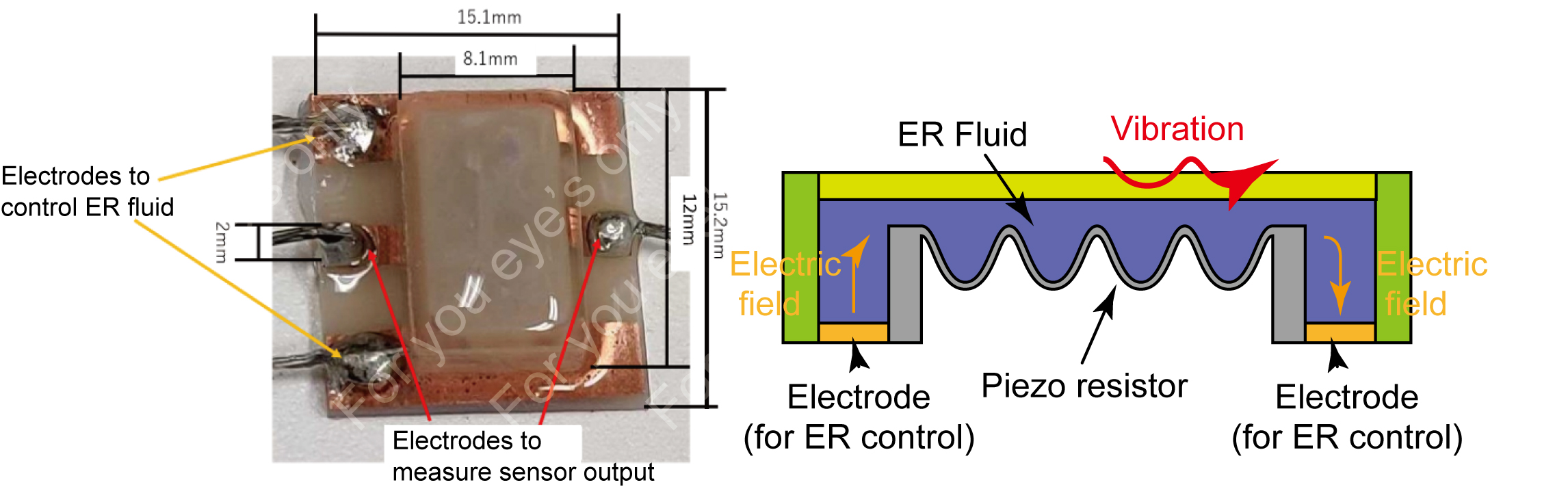
加工装置が切削加工などの動作を行う際には、材料の切削やツールの摩耗による振動など様々な音・振動など様々な音・振動が生じます。また、加工途中にツールが破損した場合、破損が発生する前にツール内部で微小な亀裂が生じ、この亀裂の発生音・振動が周囲に伝わることが知られています。こうした音・振動を計測し、状態を把握、対応して操作を制御することで、高精度にかつ安全な加工が実現可能になると考えられます。こうした音・振動は人の可聴音から人が感じ取ることのできない超低周波数・超音波まで様々な周波数の振動が混在しており、この幅広い周波数帯域の音・振動を計測することができるような新しい振動センサとして、電気的に粘度を制御することが可能な ER 流体を用いた振動センサを研究しています。